側式懸臂堆料機的構造及原理
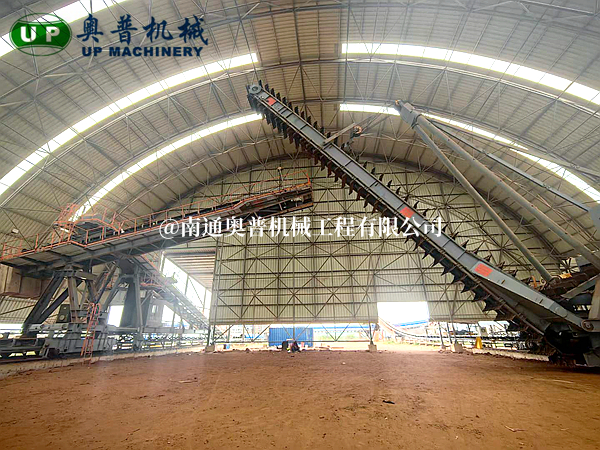
堆料機是堆場作業中常使用的是一種重要的高效率連續裝卸機械設備。它的主要功能是將卸車機卸下的貨物堆存到堆場上,方便取料機進行取料作業 。堆料機適用于火力發電廠、水泥廠、港口、礦山、冶金及大型水利工地的儲料場,是取運散裝物料高效、可連續作業的設備。
為了適應大型礦料、煤料、港口等高度自動化生產的要求,提高工作效率,保證系統的穩定性和連續性。堆料機的發展方向逐漸自動化、智能化,管理技術現代化。通過應用側式懸臂堆料機的核心控制系統,實現設備無人值守、故障自診斷及遠程中控室監控,真正實現料場堆取料機的智能化管理。
側式懸臂堆料機的構造及原理
1、懸臂部分
懸臂架由兩個變截面的工字型梁構成。橫向用鋼板連接成整體。工字型梁采用鋼板焊接成型。 臂架上面安有膠帶輸送機,膠帶機的傳動采用電動滾筒。張緊裝置設在頭部卸料點處,使膠帶保持足夠的張力,張緊裝置采用螺旋張緊。
堆料機的懸臂是進入堆場進行作業的部位,有旋轉、俯仰等動作。懸臂前端垂吊兩個料位探測儀。當料堆與探測儀接觸時,探測儀發出信號, 傳回控制室。控制室開動變幅液壓系統,通過油缸推動懸臂提升一個預先給定的高度。兩個探測儀,一個正常工作時使用,另一個用作極限保護。
2、行走機構
行走機構由三角形門架和行走驅動裝置組成。三角形門架下端外側與一套行走驅動裝置(擺動端梁)鉸接,內側與一套行走驅動裝置(固定端梁)剛性連接成一體,每個端梁配一套驅動裝置,驅動裝置共兩套。每套驅動裝置由一臺三合一減速電機驅動。驅動裝置實現軟起動、延時制動。
3、來料車
來料車由卸料斗、斜梁、立柱等組成。卸料斗懸掛在斜梁前端,使物料通過卸料斗卸到懸臂的膠帶面上。斜梁由兩根焊接工字型梁組成,橫向通過4根大小立柱支撐。大小立柱之間用工字型梁聯接,工字型梁和斜梁之間又支撐2根小立柱。這樣可保證卸料車的整體穩定性。
4、液壓系統
液壓系統實現懸臂的變幅運動。液壓系統由液壓站、油缸組成,液壓站安裝在三角形門架下部的平臺上,而油缸支撐在三角形門架和懸臂之間。5、電纜卷盤
1)動力電纜卷盤由單排大直徑卷盤、集電滑環、減速器及力矩堵轉電機組成。外界電源通過料場中部電纜坑由電纜通到卷盤上,再由卷盤通到堆料機配電柜。
2)控制電纜卷盤由單排大直徑卷盤、集電滑環、減速器及力矩堵轉電機組成。主要功能是把堆料機的各種聯系反映信號通過多芯電纜與中控室聯系起來。
6、操作
堆料機采用三種操作方式,即自動控制、機上人工控制和機旁(維修)控制。 每種操作是通過工況轉換開關實現的。
1)機上人工控制 ---- 機上人工控制適用于調試過程中所需要的工況和自動控制出現故障,操作人員在機上控制室內通過控制堆料作業。當工況開關置于人工控制時,自動、機旁(維修)工況均不能切入,機上人工控制可對懸臂上卸料膠帶機、液壓系統、行走系統進行單獨的啟停操作,各系統之間失去相互連鎖,但各系統的各項保護仍起作用。
2)自動控制 ---- 自動控制是指堆料機實現無人控制,通過監控系統監視堆料機工作的狀態。自動控制方式下的堆料作業由中控室和機上控制室均可實施。當需要中控室對堆取料機自動控制時,操作人員只要把操作臺上的自動操作按鈕按下,然后按下起動按鈕,堆料機上所有的用電設備將按照預定的程序起動,整機操作投入正常自動運行作業狀態。在中控室的操作臺上,通過按動按鈕可以對堆取料機實現整機系統的起動或停車。
在自動控制狀態下起機前首先響鈴,起動順序是:1)起動懸臂上的卸料皮帶機;2)起動液壓系統;3)起動堆料皮帶機;4)起動電纜卷盤;5)起動行走機構.
7、正常停車順序:
1)停止上料皮帶機;2)停止懸臂上的卸料皮帶機;3)停止行走機構;4)停止電纜卷盤。 總之
預均化堆場應用于冶金、電力、鋼鐵、化工和能源等行業,側式懸臂堆料機是目前預均化堆場中采用廣泛的側面堆料機。
堆料機是堆場作業中常使用的是一種重要的高效率連續裝卸機械設備。它的主要功能是將卸車機卸下的貨物堆存到堆場上,方便取料機進行取料作業 。堆料機適用于火力發電廠、水泥廠、港口、礦山、冶金及大型水利工地的儲料場,是取運散裝物料高效、可連續作業的設備。
為了適應大型礦料、煤料、港口等高度自動化生產的要求,提高工作效率,保證系統的穩定性和連續性。堆料機的發展方向逐漸自動化、智能化,管理技術現代化。通過應用側式懸臂堆料機的核心控制系統,實現設備無人值守、故障自診斷及遠程中控室監控,真正實現料場堆取料機的智能化管理。
側式懸臂堆料機的構造及原理
1、懸臂部分
懸臂架由兩個變截面的工字型梁構成。橫向用鋼板連接成整體。工字型梁采用鋼板焊接成型。 臂架上面安有膠帶輸送機,膠帶機的傳動采用電動滾筒。張緊裝置設在頭部卸料點處,使膠帶保持足夠的張力,張緊裝置采用螺旋張緊。
堆料機的懸臂是進入堆場進行作業的部位,有旋轉、俯仰等動作。懸臂前端垂吊兩個料位探測儀。當料堆與探測儀接觸時,探測儀發出信號, 傳回控制室。控制室開動變幅液壓系統,通過油缸推動懸臂提升一個預先給定的高度。兩個探測儀,一個正常工作時使用,另一個用作極限保護。
2、行走機構
行走機構由三角形門架和行走驅動裝置組成。三角形門架下端外側與一套行走驅動裝置(擺動端梁)鉸接,內側與一套行走驅動裝置(固定端梁)剛性連接成一體,每個端梁配一套驅動裝置,驅動裝置共兩套。每套驅動裝置由一臺三合一減速電機驅動。驅動裝置實現軟起動、延時制動。
3、來料車
來料車由卸料斗、斜梁、立柱等組成。卸料斗懸掛在斜梁前端,使物料通過卸料斗卸到懸臂的膠帶面上。斜梁由兩根焊接工字型梁組成,橫向通過4根大小立柱支撐。大小立柱之間用工字型梁聯接,工字型梁和斜梁之間又支撐2根小立柱。這樣可保證卸料車的整體穩定性。
4、液壓系統
液壓系統實現懸臂的變幅運動。液壓系統由液壓站、油缸組成,液壓站安裝在三角形門架下部的平臺上,而油缸支撐在三角形門架和懸臂之間。
5、電纜卷盤
1)動力電纜卷盤由單排大直徑卷盤、集電滑環、減速器及力矩堵轉電機組成。外界電源通過料場中部電纜坑由電纜通到卷盤上,再由卷盤通到堆料機配電柜。
2)控制電纜卷盤由單排大直徑卷盤、集電滑環、減速器及力矩堵轉電機組成。主要功能是把堆料機的各種聯系反映信號通過多芯電纜與中控室聯系起來。
6、操作
堆料機采用三種操作方式,即自動控制、機上人工控制和機旁(維修)控制。 每種操作是通過工況轉換開關實現的。
1)機上人工控制 ---- 機上人工控制適用于調試過程中所需要的工況和自動控制出現故障,操作人員在機上控制室內通過控制堆料作業。當工況開關置于人工控制時,自動、機旁(維修)工況均不能切入,機上人工控制可對懸臂上卸料膠帶機、液壓系統、行走系統進行單獨的啟停操作,各系統之間失去相互連鎖,但各系統的各項保護仍起作用。
2)自動控制 ---- 自動控制是指堆料機實現無人控制,通過監控系統監視堆料機工作的狀態。自動控制方式下的堆料作業由中控室和機上控制室均可實施。當需要中控室對堆取料機自動控制時,操作人員只要把操作臺上的自動操作按鈕按下,然后按下起動按鈕,堆料機上所有的用電設備將按照預定的程序起動,整機操作投入正常自動運行作業狀態。在中控室的操作臺上,通過按動按鈕可以對堆取料機實現整機系統的起動或停車。
在自動控制狀態下起機前首先響鈴,起動順序是:1)起動懸臂上的卸料皮帶機;2)起動液壓系統;3)起動堆料皮帶機;4)起動電纜卷盤;5)起動行走機構.
7、正常停車順序:
1)停止上料皮帶機;2)停止懸臂上的卸料皮帶機;3)停止行走機構;4)停止電纜卷盤。
總之
預均化堆場應用于冶金、電力、鋼鐵、化工和能源等行業,側式懸臂堆料機是目前預均化堆場中采用廣泛的側面堆料機。
相關產品:側式懸臂堆料機
_240_180.jpg) 側式懸臂堆料機
側式懸臂堆料機
